Learning Part Boundaries from 3D Point Clouds
Marios Loizou Melinos Averkiou Evangelos Kalogerakis
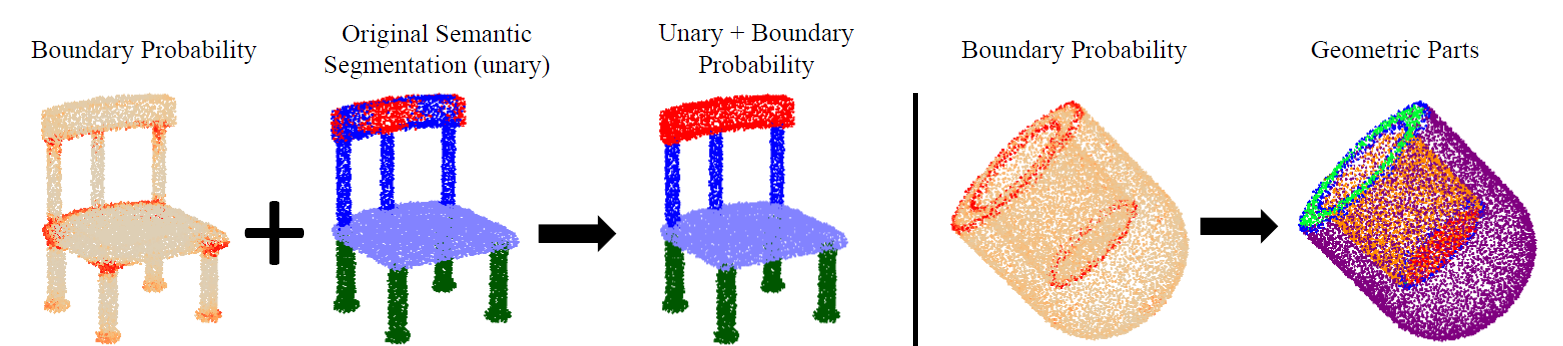
The output probability per point can be used in pairwise terms to improve graph-based semantic segmentation methods (left) by localizing boundaries between semantic parts. It can also be used in the geometric decomposition of point clouds into regions enclosed by sharp boundaries detected by our method (right).
Abstract
We present a method that detects boundaries of parts in 3D shapes represented as point clouds. Our method is based on a graph convolutional network architecture that outputs a probability for a point to lie in an area that separates two or more parts in a 3D shape. Our boundary detector is quite generic: it can be trained to localize boundaries of semantic parts or geometric primitives commonly used in 3D modeling. Our experiments demonstrate that our method can extract more accurate boundaries that are closer to ground-truth ones compared to alternatives. We also demonstrate an application of our network to fine-grained semantic shape segmentation, where we also show improvements in terms of part labeling performance.
Boundary Datasets
Geometric segmentation dataset
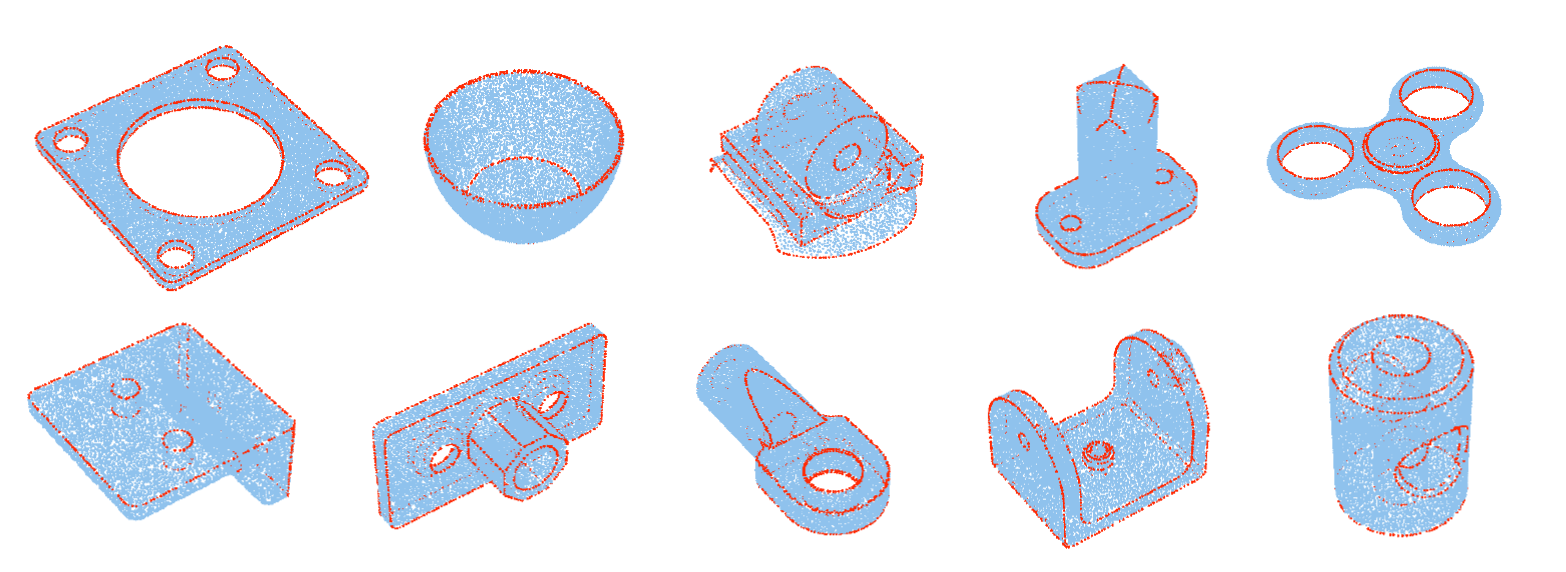
Marked (with red) boundaries on ABC point clouds for training.
Semantic segmentation dataset
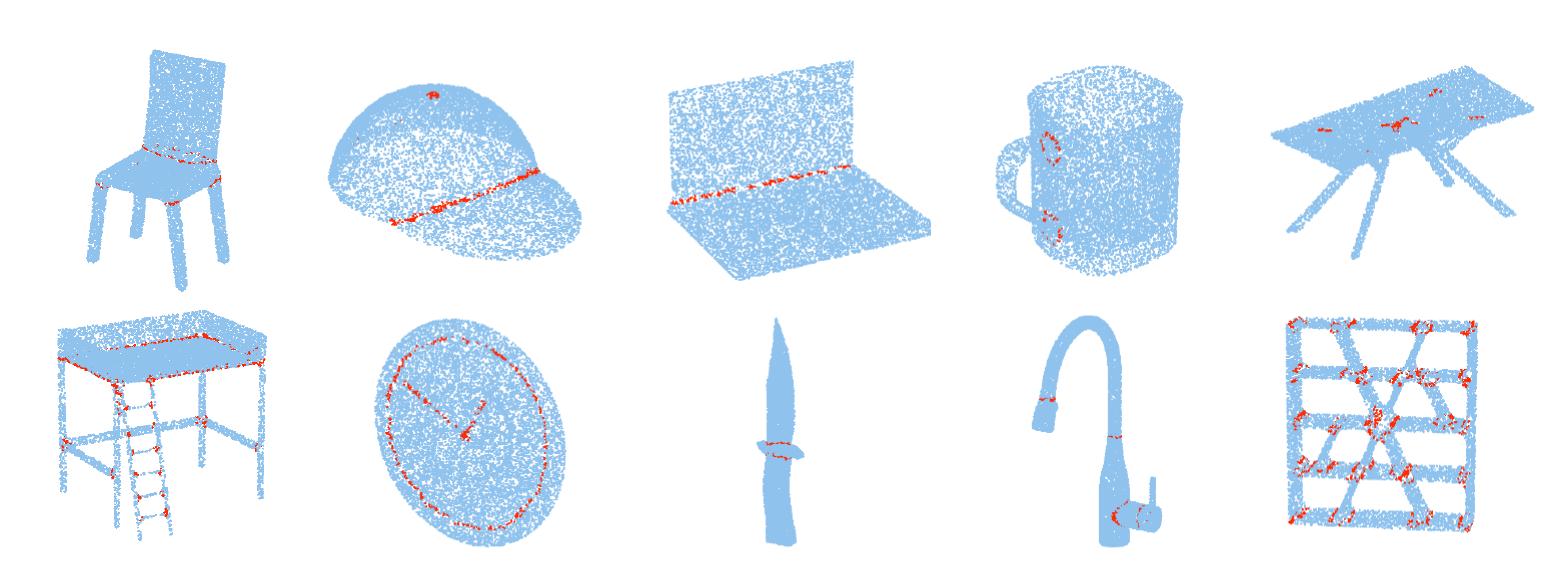
Marked boundaries on PartNet point clouds for training.
Datasets will be released soon
Results
Geometric part boundary detection
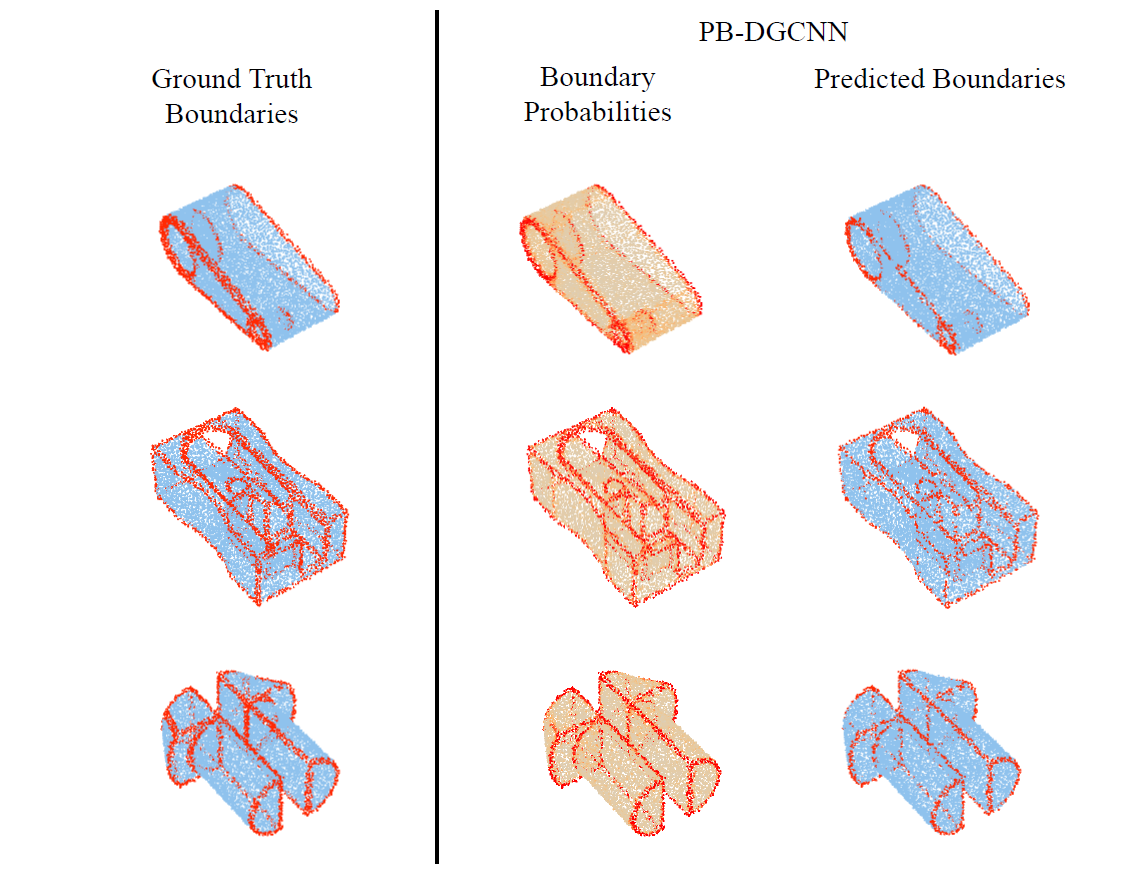
Boundaries detected by our method PB-DGCNN on some example ABC point clouds. The first column on the left shows the ground truth boundaries. The second column shows boundary probabilities produced by PB-DGCNN, and the third column shows boundaries predicted by PB-DGCNN after thresholding.
Semantic shape segmentation
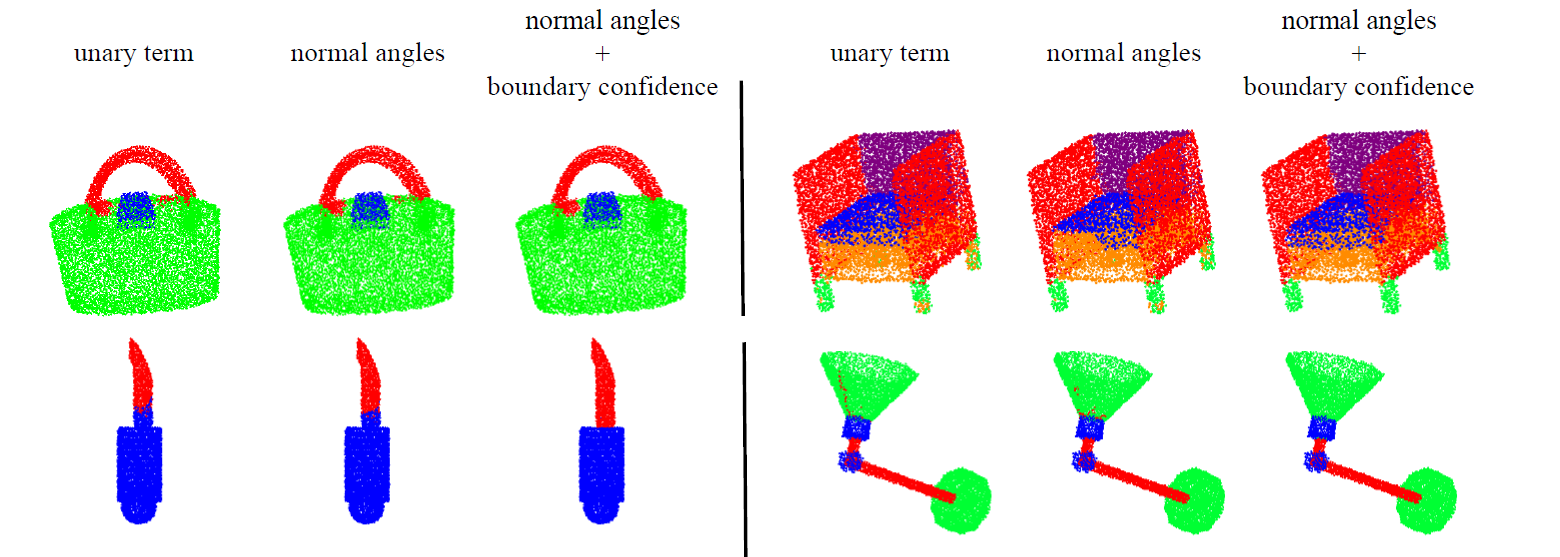
Visual comparison of semantic segmentation for example PartNet point clouds, using DGCNN alone (unary), a graph-cut formulation with normal angles in the pairwise term, and a graph-cut formulation with a combination of normal angles and boundary probabilities produced by PB-DGCNN in the pairwise term.